1) QUELLES SONT LES INFORMATIONS A ACQUERIR ?
1.1) Les grandeurs physiques ŕ acquérir :
Elles représentent l’état de la matičre d’śuvre du systčme (Niveau énergétique de batterie,…) ou l’état de l’environnement extérieur (Commande de l’accélération...)
Voici quelques exemples : Une position | Une vitesse | Une pression | Intensité lumineuse | 
| 
| 
| 
| Position du pont | Vitesse d’un véhicule | Pression de l’air | Taux de lumičre |
1.2) Les consignes : L’utilisateur communique avec le systčme par l’intermédiaire des consignes. Voici quelques exemples : E : Consignes d’exploitation (Marche, arręt …) R : Consignes de réglages (Sélecteur de vitesse, …) C : Consignes de configuration (Mode automatique / Mode pas ŕ pas / Mode manuel …) 2) COMMENT ACQUÉRIR LES INFORMATIONS ?
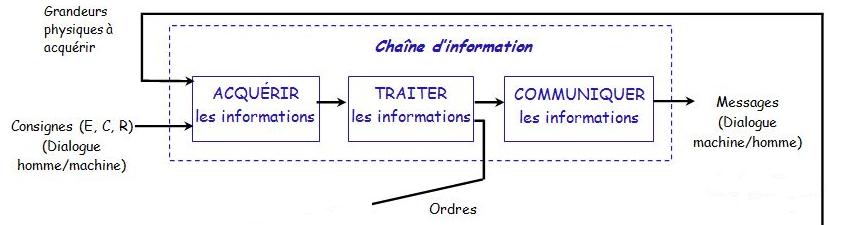
Le composant permettant d’acquérir des grandeurs physiques est un capteur. Il va saisir la grandeur physique puis la convertir en une image informationnelle pour la fonction TRAITER. 2.1) Quels sont les types d’image informationnelle ?
Information Logique 
Information analogique 
Information numérique 
2.2) Présentation des différents capteurs : 2.2.1) Les détecteurs ŕ contact : Détecteur électromécanique de position: appelé aussi interrupteur de position, il est surtout employé pour assurer la fonction détecter les positions . Il est constitué de microcontacts placés dans un corps de protection et muni d'un systčme de commande ou tęte de commande. Symbole :  |  |
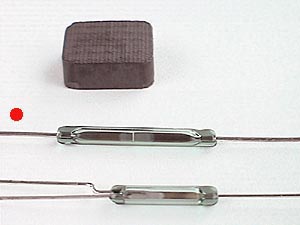
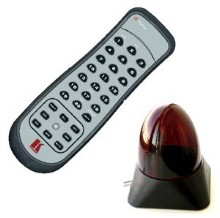
2.2.2) Les détecteurs sans contact Ce type de capteur est caractérisé par l'absence de liaison mécanique entre le dispositif de mesure et l'objet ŕ détecter. L'objet est donc ŕ proximité du capteur mais pas en contact contrairement ŕ un détecteur de position. Les avantages de ce type de détecteur sont : - Pas d’usure ; possibilité de détecter des objets fragiles…
- Détecteur statique (Pas de pičces en mouvement).
- Trčs bonne tenue ŕ l’environnement industriel : atmosphčre polluante
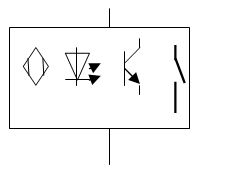
Détecteur inductif : La technologie des détecteurs de proximité inductifs est basée sur la variation d’un champ magnétique ŕ l’approche d’un objet conducteur du courant électrique. Symbole : 
|  |
Détecteur capacitif : Le fonctionnement du détecteur de proximité capacitif est basé sur la variation d’un champ électrique ŕ l’approche d’un objet quelconque.
Son domaine d'application est limité ŕ la détection des liquides car son coűt est élevé.
Symbole: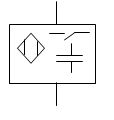 | 
|
|


 Symbole :
Symbole :